


Diário de Bordo: Dia 09 – Data Estelar 01.Novembro-2022
Robôs com senso de toque poderão em breve ajudar as pessoas a lavar roupas e outras tarefas
Em breve, os robôs poderão ajudar as pessoas a lavar a roupa e outras tarefas domésticas, pois uma nova técnica lhes deu a sensação de toque. O sistema, chamado ReSkin, permite que os robôs diferenciem objetos – como finas camadas de tecido – usando apenas o tato, algo que é natural para os humanos. No entanto, para os robôs, tarefas como pegar um copo ou dobrar toalhas são “extremamente desafiadoras” até agora, de acordo com uma equipe da Carnegie Mellon University.
A quantidade de dados coletados através do toque é difícil de quantificar e o sentido tem sido difícil de simular em robótica até recentemente.
“Os seres humanos olham para algo, nós o alcançamos, então usamos o toque para ter certeza de que estamos na posição certa para pegá-lo”, diz David Held, professor assistente da Escola de Ciência da Computação e chefe do Robots Perceiving. e Doing (R-Pad) Lab, em versão universitária . “Muito do sensor tátil que os humanos fazem é natural para nós. Nós não pensamos muito sobre isso, então não percebemos o quão valioso é.”
Para dobrar a roupa, os robôs precisam de um sensor para imitar a maneira como os dedos humanos podem sentir a camada superior de uma toalha ou camisa e agarrar as camadas abaixo dela. Os pesquisadores podem ensinar um robô a sentir a camada superior do tecido e agarrá-la, mas sem o robô sentir as outras camadas, ele não seria capaz de pegá-las ou dobrar o tecido.
"Como nós consertamos isso?" Mantido pergunta. “Bem, talvez o que precisamos é de sensibilidade tátil .”
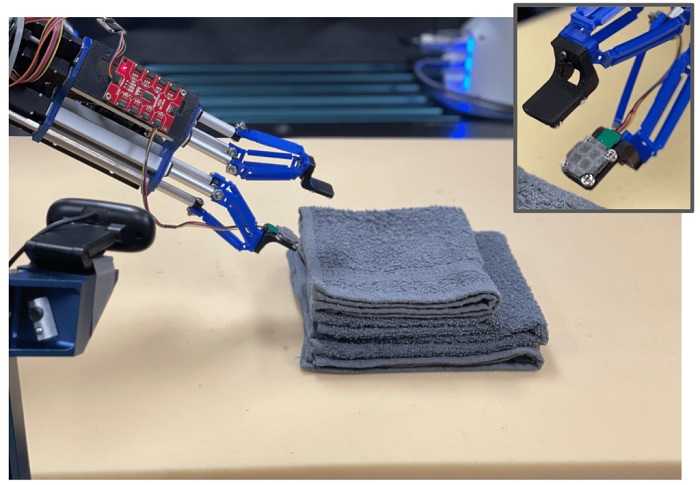
A equipe desenvolveu uma pele sensível ao toque de código aberto feita de um polímero fino e elástico incorporado com partículas magnéticas que dão uma sensação de toque de três eixos. O ReSkin ajuda o robô a sentir camadas de tecido em vez de percebê-las apenas através da visão.
"Ao ler as mudanças nos campos magnéticos de depressões ou movimento da pele, podemos obter a sensibilidade tátil", explica Thomas Weng, Ph.D. estudante do R-Pad Lab, que trabalhou no projeto com o pós-doutorando do RI Daniel Seita e o estudante de pós-graduação Sashank Tirumala. “Podemos usar esse sensor tátil para determinar quantas camadas de tecido pegamos ao beliscar com o sensor.”
Outras pesquisas usaram o sensor tátil para agarrar objetos rígidos, mas o tecido é deformável – o que significa que muda quando você o toca e, portanto, é mais difícil de manobrar. Ajustar o aperto do robô no pano altera tanto sua pose quanto as leituras do sensor.
Os pesquisadores dizem que não ensinaram ao robô como ou onde segurar o tecido. Em vez disso, eles ensinaram quantas camadas de tecido ele estava segurando, primeiro estimando quantas estavam segurando usando os sensores ReSkin e ajustando o aperto para tentar novamente. Eles então observaram o robô pegando uma e duas camadas de pano usando diferentes texturas e cores.
“O perfil desse sensor é tão pequeno que conseguimos fazer essa tarefa muito bem, inserindo-o entre camadas de tecido, o que não podemos fazer com outros sensores, principalmente sensores baseados em óptica”, diz Weng. “Conseguimos usá-lo para realizar tarefas que antes não eram alcançáveis.”
A destreza aprimorada dos robôs se deve à magreza e flexibilidade do ReSkin, explicam os pesquisadores, que enfatizam a necessidade de mais pesquisas antes que os robôs estejam prontos para lidar com uma cesta de roupa suja real .
“É realmente uma exploração do que podemos fazer com este novo sensor”, conclui Weng. “Estamos explorando como fazer os robôs sentirem com essa pele magnética coisas que são macias e explorando estratégias simples para manipular tecidos que precisaremos para que os robôs possam eventualmente lavar nossas roupas.”
A equipe apresentou suas descobertas na Conferência Internacional de Robôs e Sistemas Inteligentes de 2022.

.EXE - Inovação e Tecnologia
Luiz Antonio “Maninho” Duarte, é graduado em administração pela Universidade do Sul de Santa Catarina, possui especialização em sustentabilidade e políticas públicas, e história e filosofia pela Uninter, além de MBA em Gestão de Negócios Inovadores também pela mesma instituição e MBA em Gerenciamento de Projetos pela Fundação Getúlio Vargas - FGV. Atua diretamente em projetos de inovação, tecnologia e empreendedorismo, ocupando hoje o cargo de Gerente de Projetos em diversos projetos ligados à temática, além de ser CEO na empresa .Exe - Inovação e Projetos Faz parte do conselho de implantação do centro de inovação de Tubarão - Park Sigma como membro e do Conselho Municipal de Ciência Tecnologia e Inovação de Tubarão como convidado, além de ser conselheiro também no Conselho Municipal Tubarão 180 e Conselheiro Suplente no Conselho Regional de Administração de Santa Catarina, é o atual organizador do Startup Weekend Tubarão. Na carreira ocupou diversos cargos dentro do ecossistema do empreendedorismo inovador na região, sendo presidente da AJET - Associação de Jovens Empreendedores de Tubarão em 2018 e diretor de Gestão do Conhecimento do CEJESC - Conselho Estadual do Jovem Empreendedor de Santa Catarina em 2019. Suas áreas de interesse são Inovação, empreendedorismo, tecnologia e gerenciamento de projetos, com foco especial na construção de ecossistemas de inovação.




